Posté le 23/09/2006 à 01:35
Mécanique
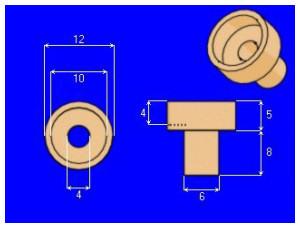
Nicolas "Always Higher" Petit m'a usiné les pièces nécessaires à l'orientation des moteurs, et en même temps m'a dégoté les joints 'U' qui vont bien...

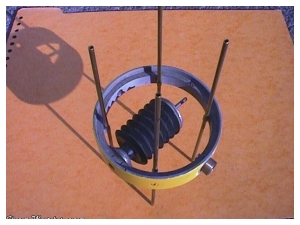
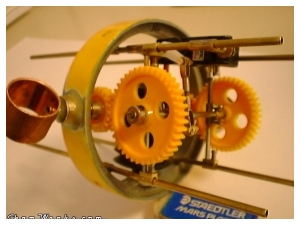
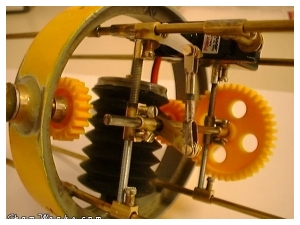
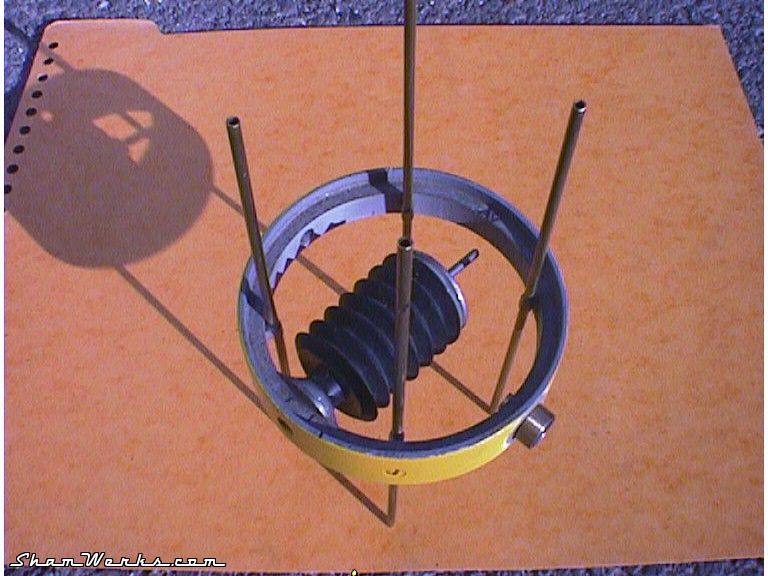
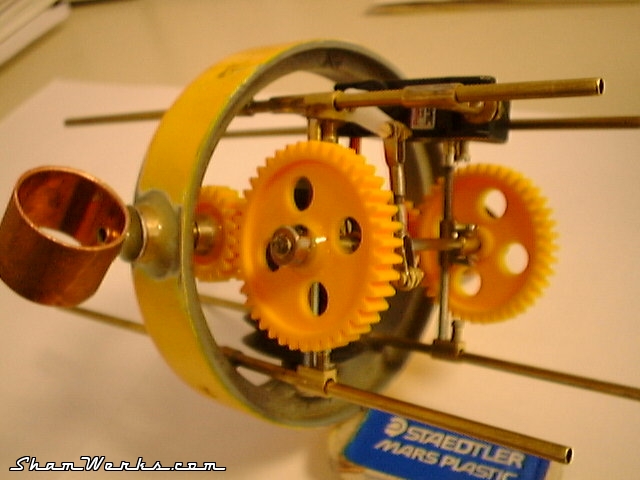
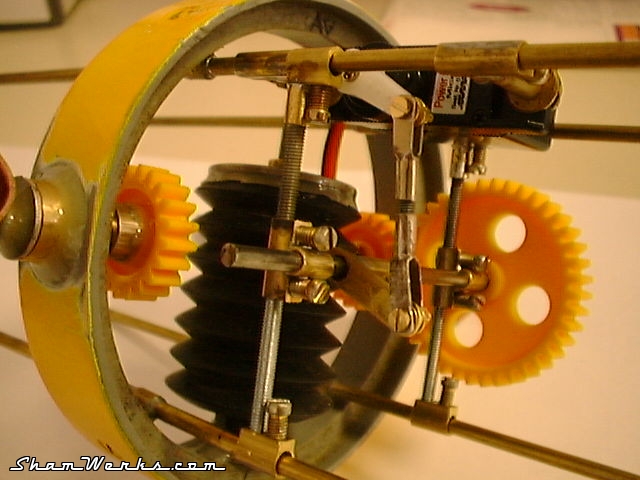
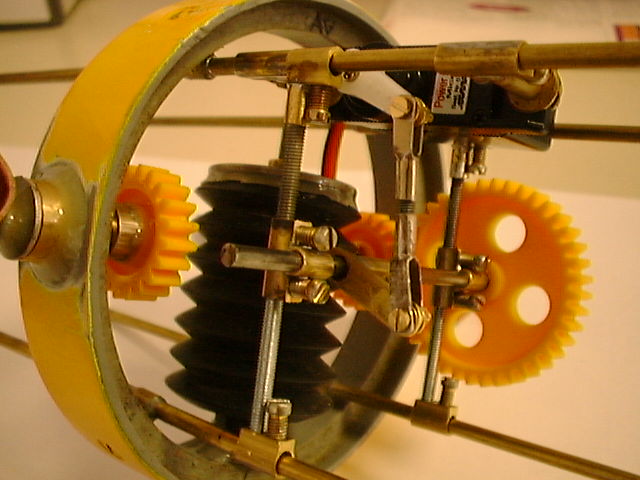
 Le mécanisme d'orientation des blocs moteur (pour plongée dynamique) :
Le mécanisme d'orientation des blocs moteur (pour plongée dynamique) :